
Underwater drone automatic navigation: 海底マッピングを実現!
réalisation de cartographie des fonds marins !
Realisierung der Kartierung des Meeresbodens!
realization of seabed mapping!
水下無人機自動導航:實現海底測繪!
ーマルチビームソナーと機体位置情報のデーター
産業用水中ドローンメーカー・FullDepthのプレスリリースより
2023年5月23日
筑波大学のスタートアップ:FullDepth
水中ドローン自動航行による海底マッピングを実現しました。
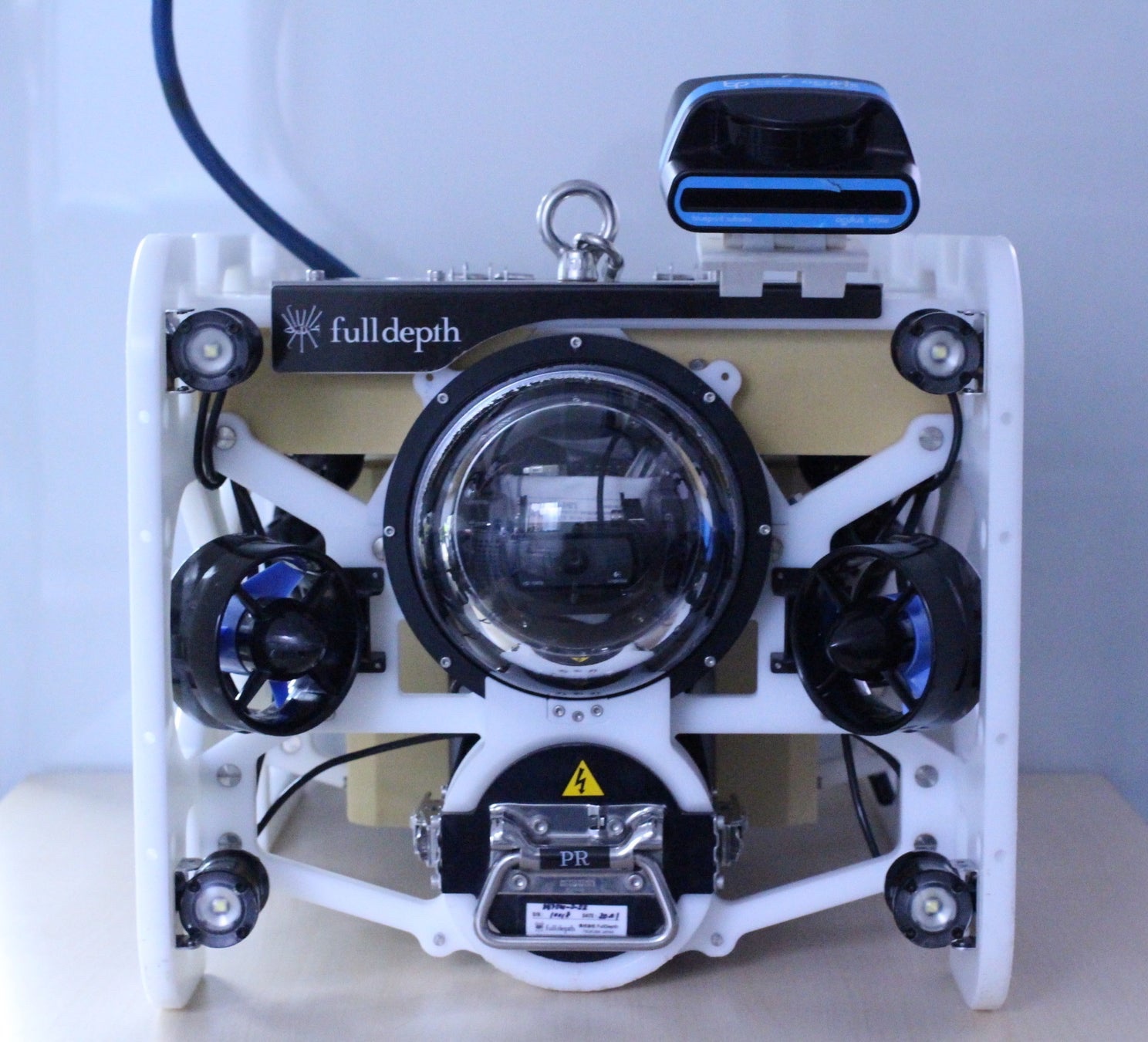
産業用水中ドローンDiveUnit300・マルチビームソナー
自社開発の産業用水中ドローン:
「DiveUnit300」を軸に、日常使いできる水中アクセス手段を提供しています。

NEDOとのPCA共同プロジェクトの成果:
2022年度Product Commercialization Alliance(PCA)の成果として、得られたものです。
水中ドローン「DiveUnit300」:
「DiveUnit300」を用いて、海底を撮影しながら自動航行を実施し、海底マッピングを完成しました。
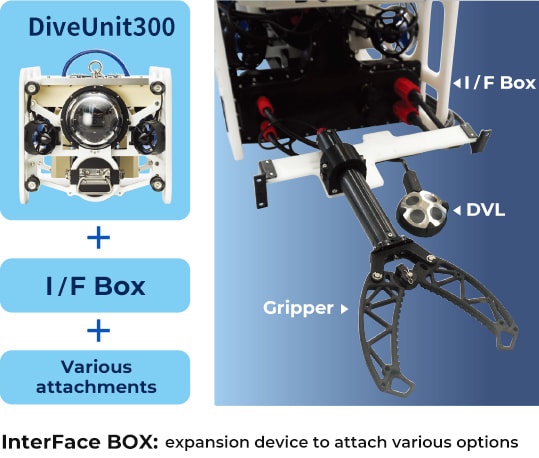
今回の成果:
水中ドローン「DiveUnit300」の改造を実施。
位置推定結果と撮影動画を用いて、海底マッピングを実現しました。

カメラで撮影した海底写真
検証実験の内容:
海底高度1.5mで、水中ドローンの自動航行を実施。
機体の位置情報とカメラの撮影動画で、1秒間隔で635枚の画像を切り出し。
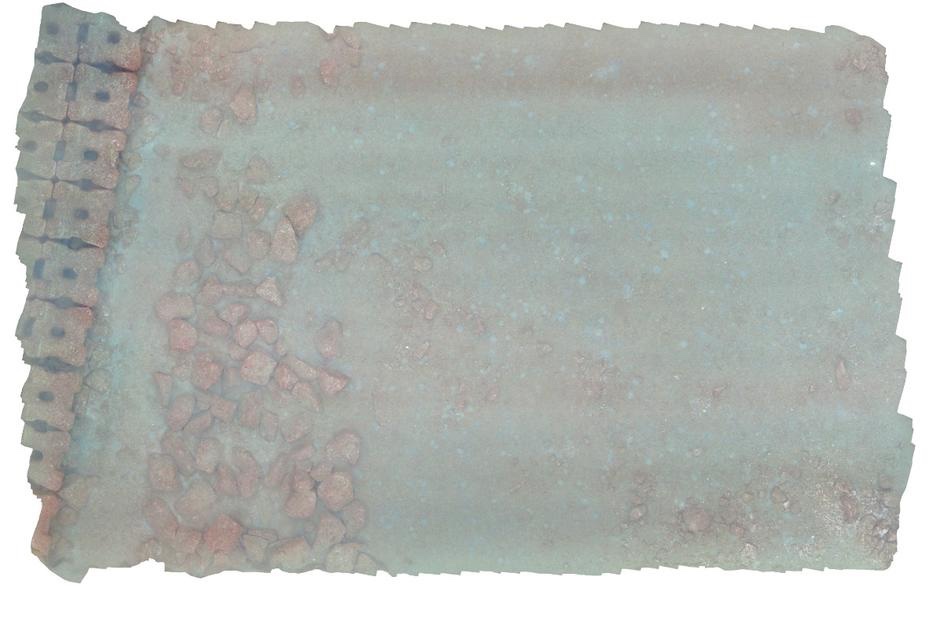
海底のオルソ画像作成:
それらを合わせてフォトグラメトリ処理を実施。
海底のオルソ画像を制作し高精細な海底マッピングを実現しました。
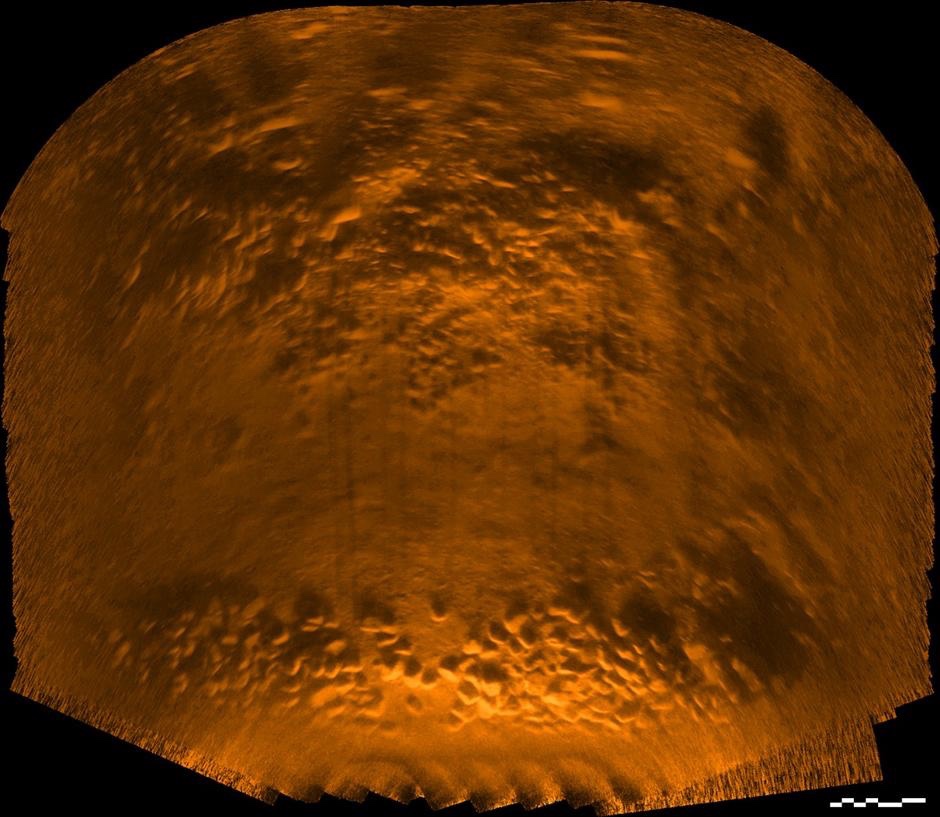
マルチビームソナーによる海底画像マップ
マルチビームソナーによる検証:
同時にマルチビームソナーでの検証を実施。
音響画像で海底マッピング:
海底高度2.0mで水中ドローンの自動航行を実施。
「マルチビームソナーのデータと、機体位置情報」を合わせ、音響画像による海底マッピングも実現しました。
https://prtimes.jp/main/html/rd/p/000000047.000024434.html
Navigation automatique de drone sous-marin : réalisation de cartographie des fonds marins !
– Sonar multifaisceaux et données de position de l’avion –
Extrait du communiqué de presse du fabricant de drones sous-marins industriels FullDepth
23 mai 2023
Startup à l’Université de Tsukuba : FullDepth
Nous avons réalisé une cartographie des fonds marins par navigation automatique de drone sous-marin.
Drone sous-marin industriel DiveUnit300, sonar multifaisceaux
Drone sous-marin industriel auto-développé :
Centrés autour de la DiveUnit300, nous proposons des moyens d’accès sous-marin utilisables au quotidien.
Résultats du projet conjoint PCA avec NEDO :
Il a été obtenu à la suite de l’Alliance de commercialisation des produits (PCA) 2022.
Drone sous-marin “DiveUnit300”:
À l’aide de “DiveUnit300”, nous avons effectué une navigation automatique tout en photographiant le fond marin et complété la cartographie du fond marin.
Réalisations cette fois :
Modification du drone sous-marin “DiveUnit300”.
Nous avons réalisé la cartographie du fond marin en utilisant le résultat de l’estimation de position et la vidéo capturée.
Photo sous-marine prise avec un appareil photo
Détails de l’expérience de vérification :
Auto-navigation d’un drone sous-marin à une altitude de 1,5 m sous la mer.
635 images sont découpées à 1 seconde d’intervalle à partir des informations de position de l’avion et de la vidéo prise par la caméra.
Création d’orthoimages du fond de l’océan :
Le traitement de photogrammétrie a été effectué en les combinant.
Nous avons créé une ortho image des fonds marins et réalisé une cartographie haute définition des fonds marins.
Carte-image du fond marin par sonar multifaisceaux
Vérification avec sonar multifaisceaux :
Parallèlement, une vérification au sonar multifaisceaux a été effectuée.
Cartographie des fonds marins avec images acoustiques :
Mise en œuvre de la navigation automatique des drones sous-marins à une altitude de 2,0 m sous la mer.
En combinant “les données sonar multifaisceaux et les informations de position des avions”, nous avons également réalisé une cartographie des fonds marins avec des images acoustiques.
https://prtimes.jp/main/html/rd/p/000000047.000024434.html
Automatische Unterwassernavigation mit Drohnen: Realisierung der Kartierung des Meeresbodens!
-Mehrstrahl-Sonar- und Flugzeugpositionsdaten-
Aus der Pressemitteilung des industriellen Unterwasserdrohnenherstellers FullDepth
23. Mai 2023
Startup an der Universität Tsukuba: FullDepth
Wir haben die Kartierung des Meeresbodens mithilfe der automatischen Navigation von Unterwasserdrohnen realisiert.
Industrielle Unterwasserdrohne DiveUnit300, Mehrstrahl-Sonar
Selbstentwickelte industrielle Unterwasserdrohne:
Rund um die DiveUnit300 bieten wir Unterwasser-Zugangsmittel, die täglich genutzt werden können.
Ergebnisse des PCA-Verbundprojekts mit NEDO:
Es wurde als Ergebnis der Product Commercialization Alliance (PCA) 2022 erhalten.
Unterwasserdrohne „DiveUnit300“:
Mit „DiveUnit300“ führten wir eine automatische Navigation durch, fotografierten den Meeresboden und führten die Kartierung des Meeresbodens durch.
Erfolge dieses Mal:
Die Unterwasserdrohne „DiveUnit300“ wurde modifiziert.
Mithilfe des Ergebnisses der Positionsschätzung und des aufgenommenen Videos haben wir eine Kartierung des Meeresbodens durchgeführt.
Mit einer Kamera aufgenommenes Unterwasserfoto
Details zum Verifizierungsexperiment:
Automatische Navigation einer Unterwasserdrohne in einer Höhe von 1,5 m unter dem Meeresspiegel.
Aus den Positionsinformationen des Flugzeugs und dem von der Kamera aufgenommenen Video werden im 1-Sekunden-Takt 635 Bilder ausgeschnitten.
Orthobilder des Meeresbodens erstellen:
Die photogrammetrische Verarbeitung wurde durch deren Kombination durchgeführt.
Wir haben ein Orthobild des Meeresbodens erstellt und eine hochauflösende Kartierung des Meeresbodens durchgeführt.
Meeresboden-Bildkarte durch Mehrstrahl-Sonar
Verifizierung mit Multibeam-Sonar:
Gleichzeitig wurde eine Verifizierung mit Mehrstrahlsonar durchgeführt.
Meeresbodenkartierung mit akustischen Bildern:
Automatische Navigation von Unterwasserdrohnen in einer Höhe von 2,0 m unter dem Meeresspiegel implementiert.
Durch die Kombination von „Multi-Beam-Sonardaten und Flugzeugpositionsinformationen“ haben wir auch eine Meeresbodenkartierung mit akustischen Bildern realisiert.
https://prtimes.jp/main/html/rd/p/000000047.000024434.html