立命館大:キュウリを掴むグリッパー(動画):
Ritsumeikan University: Gripper that grabs a cucumber:
立命馆大学:抓黄瓜的抓手:
立命館大学
ホクレン農業協同組合
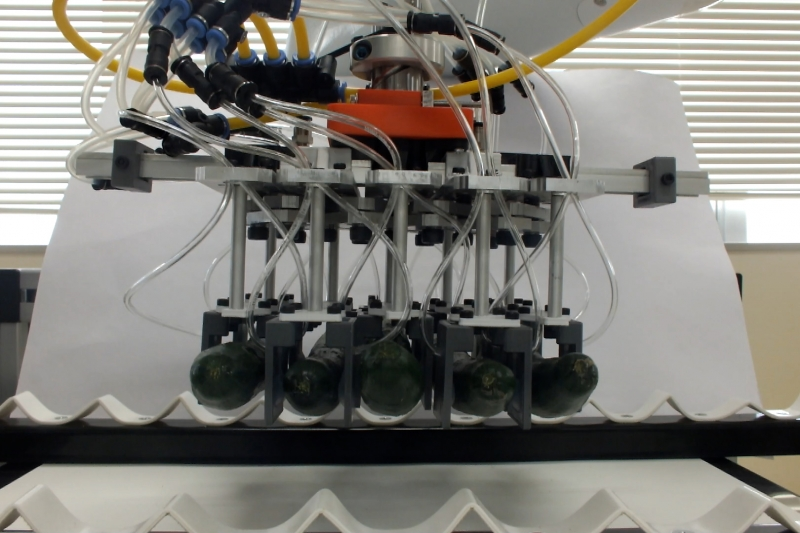
近江度量衡共同で、キュウリを梱包するロボット向けグリッパーを開発した。
- 何本か並んだキュウリの間に、
- グリッパーを差し込み、
- 空気圧でシリコン膜を膨らませて把持する。
キュウリのほか、長細くてふぞろいな農作物の箱詰め用などに提案していく。
従来の問題点:
現行の梱包ロボットシステムは、真空吸引でキュウリをハンドリングしている。
- 上部からキュウリを吸い付けるため、
- アームを動かした際に外れて、
- 飛んでいく可能性があった。
今回の改善点:
- 左右から把持すれば、
- アームの移動方向の力を受けられ、
- 落とさずに済む。
キュウリ以外にも、食材を緻密に並べる用途に提案する。
ニュースイッチ