💡東工大、アリのような動きをする六脚ロボットを制御
要点
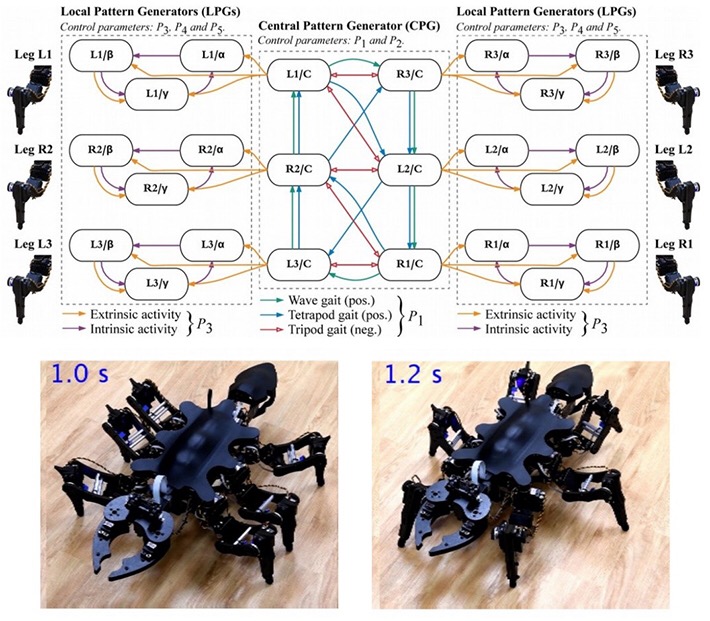
- 非線形振動子を用いて少ないパラメーターで複数の歩行動作の生成に成功
- フィールド・プログラマブル・アナログ・アレイで複雑な歩行パターンを生成
概要
東京工業大学 科学技術創成研究院 バイオインタフェース研究ユニットの小池康晴教授、吉村奈津江准教授、ルドビコ・ミナチ特任准教授(兼ポーランド科学アカデミー研究員)、マッティア・フラスカ研究員(兼カターニャ大学)らの研究チームは、アリやゴキブリのように複雑な脚部を持つロボットに階層制御装置アーキテクチャー[用語1]を採用した新しい駆動方式を開発した。
東工大ニュース | 東京工業大学