💡Controlling a six-legged robot that moves like an ant
Point
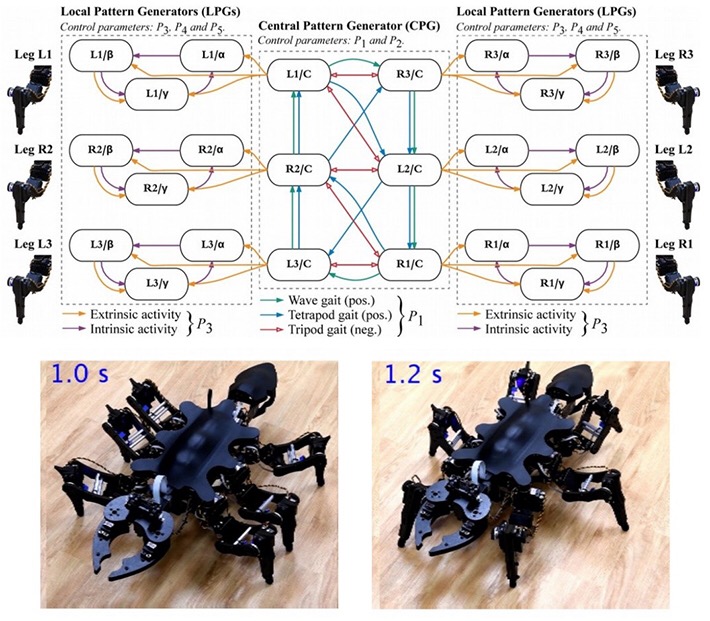
- Successful generation of multiple walking motions with few parameters using nonlinear oscillator
- Generate complex walking patterns with field programmable analog arrays
Overview
Professor Yoshiharu Koike, Associate Professor Yasuhiro Yoshimura, Associate Professor Ludovico Minasi (Researcher at Polish Academy of Sciences) and Researcher Mattia Flaska (University of Catania) and others at the Institute of Science and Technology of Tokyo Institute of Technology Developed a new driving scheme that employs a hierarchical control device architecture [Terminology 1] for robots with complex legs like ants and cockroaches.
Tokyo Tech News | Tokyo Institute of Technology