💡控制像蚂蚁一样移动的六腿机器人
要旨
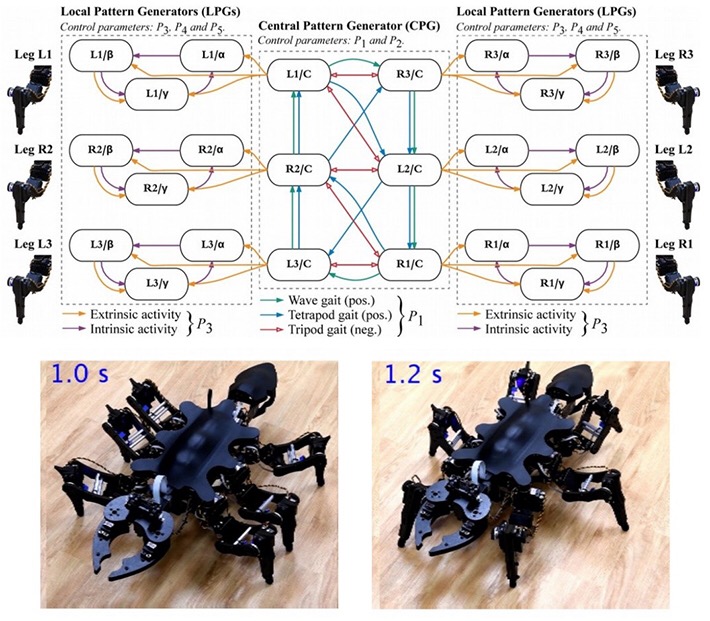
- 使用非线性振荡器成功生成参数很少的多个步行运动
- 用现场可编程模拟阵列生成复杂的步行模式
摘要
东京工业大学理工研究所副教授Yoshiharu Yoshimura,副教授Ludovico Minasi教授(波兰科学院研究员)和Mattia Flaska研究员(卡塔尼亚大学)等人 已经开发了一种新的驱动方案,对于像蚂蚁和蟑螂那样的复杂腿部的机器人,采用分级控制设备架构[术语1]。
东京技术新闻|东京工业大学
💡控制像蚂蚁一样移动的六腿机器人
要旨
摘要
东京工业大学理工研究所副教授Yoshiharu Yoshimura,副教授Ludovico Minasi教授(波兰科学院研究员)和Mattia Flaska研究员(卡塔尼亚大学)等人 已经开发了一种新的驱动方案,对于像蚂蚁和蟑螂那样的复杂腿部的机器人,采用分级控制设备架构[术语1]。
东京技术新闻|东京工业大学