Tokyo Univ: 皮膚のある指型ロボット:
Robot en forme de doigt avec peau :
Fingerförmiger Roboter mit Haut:
Finger-shaped robot with skin:
帶皮膚的手指形機器人:
ー傷ついても細胞増殖で自己修復ー
東京大学
竹内昌治教授研究グループが、
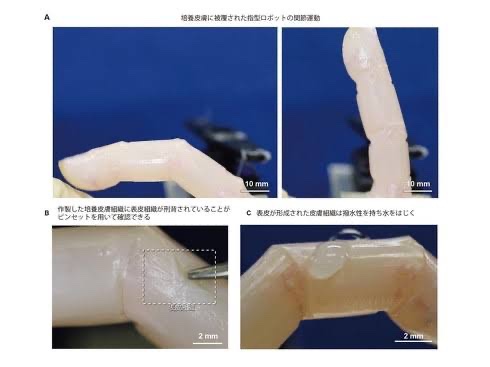
人の皮膚細胞由来の培養皮膚で覆った、指型ロボットを開発した。
指型ロボットは、傷ついても細胞増殖で自己修復する。
従来の課題:
今までのロボットの表面は、「シリコンゴムで覆われていることが多い」
傷つくと元に戻らず、「内部の熱を逃がしづらいなどの課題」がある。
義手や培養皮革に応用:
今回開発した技術は、義手や培養皮革などに応用できる。
神経や血管を再現:
現在は神経や血管などは再現されていない。
機能追加することで、センシングなど生物機能を開発する。
日本経済新聞
https://www.nikkei.com/article/DGXZQOUC0964X0Z00C22A6000000/
L’Université de Tokyo : Robot en forme de doigt avec peau :
-Auto-réparation par prolifération cellulaire même endommagée-
Université de Tokyo
Professeur Shoji Takeuchi
Le groupe de recherche
Nous avons développé un robot de type doigt recouvert de peau cultivée dérivée de cellules de peau humaine.
Les robots de type doigt s’auto-réparent par prolifération cellulaire même s’ils sont blessés.
Défis classiques :
Jusqu’à présent, la surface des robots est “souvent recouverte de caoutchouc de silicone”.
Lorsqu’il est endommagé, il ne peut pas être restauré et il y a un “problème tel que la difficulté à dégager de la chaleur à l’intérieur”.
Appliqué aux mains artificielles et au cuir cultivé :
La technologie développée cette fois peut être appliquée aux mains artificielles et au cuir cultivé.
Reproduire les nerfs et les vaisseaux sanguins :
Actuellement, les nerfs et les vaisseaux sanguins ne sont pas reproduits.
En ajoutant des fonctions, nous développerons des fonctions biologiques telles que la détection.
Nihon Keizai Shimbun
Die Universität Tokio: Fingerförmiger Roboter mit Haut:
-Selbstreparatur durch Zellproliferation auch bei Beschädigung-
Universität Tokio
Professor Shoji Takeuchi
Die Forschungsgruppe
Wir haben einen fingerartigen Roboter entwickelt, der mit gezüchteter Haut aus menschlichen Hautzellen bedeckt ist.
Roboter vom Fingertyp reparieren sich selbst durch Zellproliferation, selbst wenn sie verletzt sind.
Konventionelle Herausforderungen:
Bisher sei die Oberfläche von Robotern „häufig mit Silikonkautschuk überzogen“.
Wenn es beschädigt ist, kann es nicht wiederhergestellt werden, und es gibt ein “Problem wie Schwierigkeiten bei der Wärmeabgabe im Inneren”.
Angewandt auf künstliche Hände und kultiviertes Leder:
Die damals entwickelte Technologie kann auf künstliche Hände und kultiviertes Leder angewendet werden.
Nerven und Blutgefäße reproduzieren:
Derzeit werden Nerven und Blutgefäße nicht reproduziert.
Durch das Hinzufügen von Funktionen werden wir biologische Funktionen wie die Wahrnehmung entwickeln.
Nihon Keizai Shimbun
Living skin on a robot Highlights
– ScienceDirect
• The method for generating seamless coverage of 3D objects with skin equivalent
• Three-joint robotic finger covered with living skin equivalent
• Wound repair of a robotic finger covered with dermis equivalent
https://www.sciencedirect.com/science/article/pii/S2590238522002399