DENSO:开发水果收获机器人:收获苹果和梨
电装
农业研究组织,
立命馆大学
它以与人类相同的速度收获水果,例如苹果和梨。
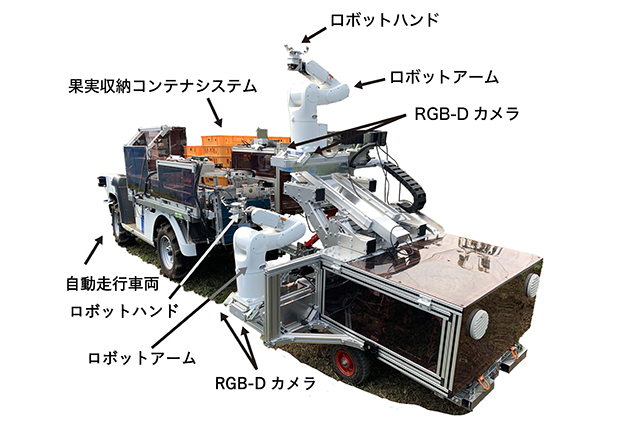
开发了水果收获机器人的原型。
该公司计划继续进行实证研究。
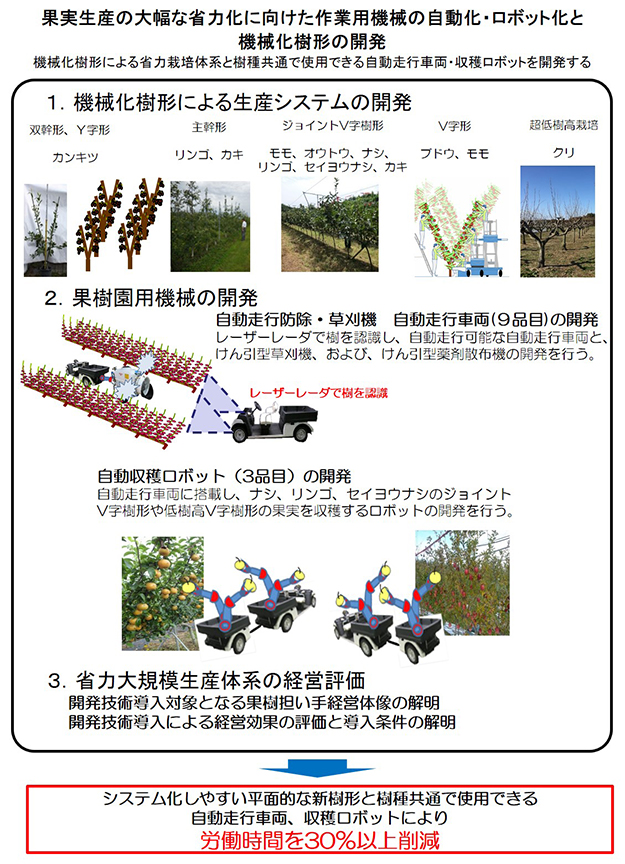
水果收获工作的自动化:
特别是,
实现柑橘类水果和苹果等9种果树的自动化和机械化。
开发了一种密集的树木种植形式,
根据V形树
可用于各种任务,
我们一直在开发自动行车和收割机器人。
水果储存容器系统:
当容器装满水果时,
自动替换为空容器
继续进行自动收割工作。
它的收获速度几乎与人类收获速度相同(11秒/片)。
无人机
https://www.drone.jp/news/2020122811105742159.html
立命馆大学农业研究组织电装开发自动水果收获机器人的原型