

SUBARU: UAV, collision avoidance test conducted: world’s first, relative speed 100km / h
NEDO / SUBARU / Japan Radio / Japan Avionics / Mitsubishi Electric / Autonomous Control Systems Research Laboratories
UAV: Collision avoidance test
From July 24th to 25th, it was the first in the world in a wide-area flight area (Minamisoma City, Fukushima Prefecture).
It is an autonomous collision avoidance test of a medium sized unmanned aerial vehicle at a relative speed of 100 km / h.
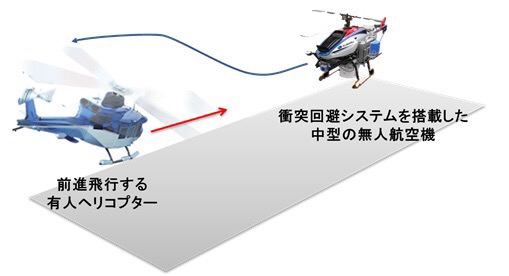
A mid-sized unmanned aerial vehicle equipped with a camera, radar, flies at about 40 km / h.
Detecting a manned helicopter flying forward at about 60 km / h from the front.
We conducted flight tests to avoid collisions autonomously.
Implementation test: method and results
<Method>
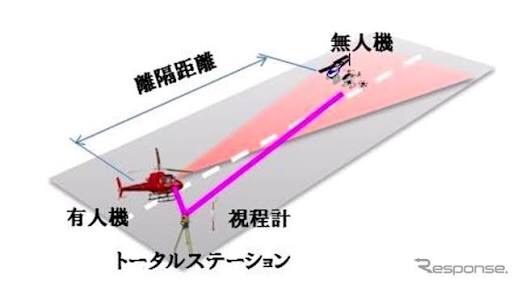
A medium-sized UAV and a manned helicopter approach at a relative speed of 100 km / h (UAV: 40 km / h, a manned helicopter: 60 km / h)
A collision avoidance path is generated based on detection and identification data of the medium-sized UAV sensor. Confirm that the medium-sized UAV flies along this avoidance route.
After avoiding the manned helicopter, make sure that the mid-sized UAV returns to its original flight path.
<Result>
Using collision avoidance sensors, we confirm that a manned helicopter is properly detected and identified.
Collision detection is automatically performed based on the detection / identification data, and it is confirmed that a collision avoidance route is generated.
Fly the generated collision avoidance route and confirm that collision can be avoided autonomously.
After collision avoidance, confirm return to the flight path set in advance.