MIT’s deflated balloon robot hand can pick up objects 100x its own weight
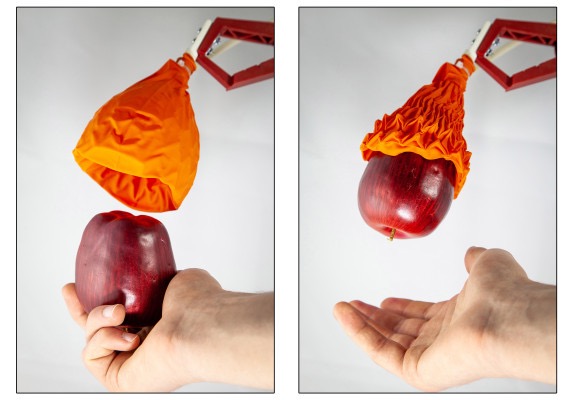
The gripper itself is made of an origami-inspired skeletal structure, covered in either fabric or a deflated balloon.
It’s a principle the team recently employed on another project designed to create low-cost artificial muscles.
A connector attaches the gripper to the arm and also sports a vacuum tube that sucks air out from the gripper, collapsing it around an object.
TechCrunch